Än, yy, tee, nyt! Tekoälyä varhaiskasvatukseen ja esiopetukseen -hankkeen hankeopettajana olen järjestänyt varhaiskasvatus- ja esiopetusikäisille lapsille etätyöpajoja tekoälystä. Tampereella pidimme digityöpajoja eli Lasten Teams Tärskyjä yhteistyössä toisen Tampereella samaan aikaan käynnissä olevan digihankkeen kanssa. Tekoälyyn liittyen pidimme pajoja yhteensä kolmena päivänä. Pajoihin osallistui vaihteleva määrä osallistujia yhdestä ryhmästä noin kymmeneen ryhmään. Lasten ikähaarukka oli 3-vuotiaista esiopetusikäisiin. Työpajan sisältö löytyy Innokkaan Materiaalit –sivuilta: https://www.innokas.fi/wp-content/uploads/2023/04/Lasten-tekoalytuokio-1.pdf.
Etätyöpajat toimivat niin, että ilmoittautuneelle opettajalle lähetetään ennakkoon Teams-linkki, jonka kautta pajaan voi osallistua ja tarvikkeet, joita pajaa varten tarvitaan. Työpajaan liitytään omalta tietokoneelta ja lapset pääsevät osallistumaan työpajaan omista tiloista käsin.
Työpajojen alussa tutustuimme toisiimme tervehtimällä kaikki toisiamme mikrofonien ja kameroiden kautta. Tämän jälkeen tutustuimme tekoälyyn muutaman tehtävän avulla, jossa lapset saivat osallistua nostamalla käden ylös tai jos lapsiryhmiä oli vähän, avaamalla mikrofonin ja kertomalla. Näiden yhteisten harjoitusten jälkeen annoin varsinaiset tehtävät, joita lapset sitten lähtivät itse suorittamaan pienissä ryhmissä. Tehtäviä oli yhteensä neljä ja ne oli suunniteltu niin, että monen ikäisten lapset voivat niitä tehdä aikuisen avustuksella. Olimme linjoilla auttamassa ongelmatilanteissa ja kysymyksissä noin 45 minuutin ajan. Lapset saivat vielä lopuksi tulla kertomaan fiiliksiään tehtävistä kameran kautta.
Työpajat sujuivat hyvin ja otin mukaan myös oman ryhmäni lapsia, jotka toimivat ”apuopettajina” ja auttoivat kysymyksiin vastaamisessa. Rakenne, jossa on yhteinen aloitus ja sen jälkeen lapset pääsevät itse tekemään, toimi hyvin ja lapset jaksoivat keskittyä tehtävien tekemiseen. Oli hyvä, että lapset pääsivät osallistumaan yhteiseenkin osuuteen esimerkiksi viittaamalla, sillä muuten vuorovaikutus lasten kanssa jää vähäiseksi. Ryhmät jäivät usein tekemään tehtäviä vielä varsinaisen ajan jälkeenkin ja lasten innostus uuteen oli tietokoneen ruudunkin kautta selvästi aistittavissa. Myös palautteet opettajilta työpajojen jälkeen ovat olleet hyviä: ”Lapset olivat innoissaan ja olisivat jatkaneet harjoittelua vaikka koko päivän! Tekoälyn tekemät kuvat olivat parhaita.”
Yhteenvetona huomasin, että tällaiset etäoppitunnit ovat toimiva tapa jo varhaiskasvatusikäisten lasten kanssa. Lapsille on hienoa päästä osallistumaan jo Teams –kokoukseen ja se motivoi uuden oppimisessa. Etäoppitunnilla opettajien on helppo lähteä kokeilemaan lasten kanssa uutta, kun heillä on jo valmis pohja ja tarvittaessa apua saatavilla. Saimme Täskyjen avulla innostettua ainakin muutamia uusia opettajia tekoälyn maailmaan ja tästä on hyvä jatkaa eteenpäin!
Laura Taittonen, varhaiskasvatuksen opettaja, Tammelan koulun esiopetus, Tampere
Tekoälyä on jo nyt kaikkialla, ja on tärkeää, että sen käyttäjät ja tulevat kehittäjät ymmärtävät, missä tekoälyä on, mitä se on ja miten se toimii. Olemme laatineet opettajien työn tueksi materiaalin, jossa kuvataan neljä erilaista monialaista oppimiskokonaisuutta, joiden kautta tekoälyä tehdään oppilaille tutuksi ikätason mukaisesti. Ajatuksena on edetä tekoälyn käsitteen ymmärtämisen kautta sen aktiiviseen ja tarkoituksenmukaiseen hyödyntämiseen sekä tekoälyn mahdollisuuksien ja uhkien kriittiseen tarkasteluun. Pedagogisesti tässä materiaalissa esitetyt oppimiskokonaisuudet perustuvat aktiiviseen, yhteisölliseen ja ongelmaperustaiseen oppimiseen.
Rajakylän koulussa tekoälyn opettaminen on osa koulun STEAM-viitekehystä, joka esitellään kuviossa 1.
Kuvio 1. Rajakylän koulun STEAM-viitekehys
Yleisinä pedagogisina lähestymistapoina STEAM-viitekehyksessä on aktiivinen, oppijalähtöinen ja tekemällä oppiminen (Bada & Olusegun, 2015.; Martin, 2015). Viitekehys rakentuu yhteisöllisen oppimisen, oppimisen säätelyn ja ongelmanratkaisun sekä pedagogisen käsikirjoittamisen (scripting) teoreettiseen perustaan (linkki aiempaan blogipostaukseen). Opettajan näkökulmasta teoreettiset perusteet havainnollistavat näkökulmia, joita on syytä ottaa huomioon STEAM-oppimista suunniteltaessa ja toteutettaessa. Oppijan näkökulmasta puolestaan viitekehys kuvaa niitä taitoja, joita STEAM-projekteissa harjoitellaan.
Teknologiapolkua on jäsennetty neljän kokonaisuuden pohjalta. Näitä kokonaisuuksia ovat 1) koodaus ja robotiikka, 2) digitaalinen valmistaminen, 3) multimedia ja 4) tekoäly. Viitekehyksessä sekä pedagogiset että teknologiset ulottuvuudet on vaiheistettu vuosiluokittain siten, että kunkin oppimisen taidon harjoittelu aloitetaan perusteista edeten taitojen kasvaessa kohti haastavampia taitoja kuten luova ongelmanratkaisu ja sosiaalisesti jaettu oppisen säätely. Sama ajatus on myös teknologian hyödyntämisen taustalla. Nuorimmat oppilaat työskentelevät pääasiassa ilman teknologiaa, perinteisiä käsityö- ja askartelumenetelmiä hyödyntäen, ja pikkuhiljaa edetään kohti teknologian luovaa, monipuolista ja joustavaa käyttöä.
Pedagogisen ja teknologisen lähestymistapojen lisäksi STEAM-viitekehyksessämme kuvataan jokaisen luokka-asteen osalta luonnontieteellisten ja matemaattisten oppiaineiden ydinsisällöt, joista STEAM-projektien oppimistavoitteet muodostuvat.
STEAM-projekteja suunniteltaessa on tärkeä pohtia, mitä yhteisöllisen oppimisen, oppimisen säätelyn ja ongelmanratkaisun osa-alueita lähdetään harjoittelemaan. Yhteisöllinen oppiminen, jossa ryhmän jäsenet osallistuvat yhdessä jokaiseen työskentelyvaiheeseen, keskenään argumentoiden ja asiantuntemustaan jakaen, on haastavaa, ja harjoittelu voidaankin aloittaa yhteistoiminnallisesta työskentelystä, jossa yhteinen tavoite jaetaan osiin (vertikaalinen työnjako), ja jokainen ryhmän jäsen tekee oman osuutensa yhteisestä tuotoksesta. Taitojen kasvaessa työskentely saa enemmän yhteisöllisiä piirteitä, kuten tehtävien horisontaalinen jakaminen (jokainen tekee samaa tehtävänosaa, mutta eri roolista käsin), yhteisöllinen tiedonrakentelu ja jatkuva sosiaalinen vuorovaikutus.
Oppimisen säätely etenee oman oppimisen suunnittelusta, tarkkailusta ja arvioinnista (itsesäätely) kohti ryhmän työskentelyn säätelyä. Itsesäätelytaitojen kasvaessa harjoitellaan ’kanssa-säätelyä’ (co-regulation), jolloin oppijat auttavat toisiaan säätelemään omaa oppimistaan, työskentelyään, tunteitaan ja motivaatiotaan. Ryhmässä työskenneltäessä on myös tärkeää, että itsesäätelyn ohella oppijat pystyvät yhdessä tarkkailemaan myös ryhmän työskentelyä ja reflektoimaan mm. sitä, miten yhteinen työskentely etenee suhteessa oppimistavoitteisiin, ovatko käytetyt strategiat toimivia ja mitä on opittu. (Hadwin & al., 2011.) Oppimisen sosiaalinen säätely on kuitenkin vaativaa, ja onkin hyvä harjaannuttaa ensin itsesäätelyn taitoja ennen siirtymistä jaettuun oppimisen säätelyyn.
STEAM-pedagogiikan ytimessä on avoimet ongelmat, joiden ratkaiseminen vaatii yhteistyötä ja luovuutta. Pystyäkseen ratkomaan monimutkaisia, avoimia tosielämän haasteita, tulee oppijoiden saada tilaisuuksia harjoittaa itseohjautuvuutta, luovaa ajattelua ja teknologian joustavaa käyttöä. Ongelmanratkaisutaitoja onkin hyvä lähteä harjoittelemaan toteuttamalla selkeästi rajattuja ja -määriteltyä projekteja. Asteittain ongelma avoimuutta voidaan lisätä sitä mukaan, kun oppilaiden muut taidot, kuten yhteistyö- ja säätelytaidot, kehittyvät.
Pedagoginen käsikirjoittaminen ohjaa opettajaa ’orkestroimaan’ STEAM-projekteja oppijoiden kannalta tarkoituksenmukaisella tavalla (Vuopala, 2013). Pedagoginen käsikirjoitus eli skripti tukee oppijoiden työskentelyä projektin parissa määritellessään aktiviteetit, vastuut, ohjeet, resurssit ja aikataulut, joihin oppijoiden odotetaan sitoutuvan (Hämäläinen, 2008; Kollar, Fischer, & Hesse, 2003; Weinberger, 2003). Siinä vaiheessa, kun oppijat vasta harjoittelevat yhteisöllistä työskentelyä, oppimisen säätelyä ja ongelmanratkaisua, tarvitaan usein yksityiskohtainen skripti, toisin sanoen tarkat ohjeet, aikataulut jne, tukemaan työskentelyä. Kun oppijoiden taidot kehittyvät, voidaan skriptiä väljentää, ja antaa oppijoille mahdollisuus ottaa itse enemmän vastuuta työskentelyn koordinoinnista, suunnittelusta, toteutuksesta ja arvioinnista. (Weinberger & al., 2005.)
Tekoälyn oppimispolussa edetään tekoälyn käsitteen ymmärtämisen kautta sen aktiiviseen ja tarkoituksenmukaiseen hyödyntämiseen sekä tekoälyn mahdollisuuksien ja uhkien kriittiseen tarkasteluun. Varhaiskasvatuksessa ja esiopetuksessa keskeistä on oppia tekoälyn toimintaperiaatteita, erityisesti asioiden tunnistamista, luokittelua ja vertailua eri ominaisuuksien perusteella. Tässä vaiheessa tekoälyyn tutustutaan pääasiassa ilman varsinaisia tekoälysovelluksia. Alkuopetuksessa siirrytään tarkastelemaan kuvatekoälyä, mutta edelleen pääpaino on tekoälyn toimintalogiikan ymmärtämisessä. Kuvatekoälyn opettelusta edetään alakoulussa koneoppimiseen ja konenäköön sekä opetettavaan ja keskustelevaan tekoälyyn. Yläkoulussa tekoälyä opetellaan hyödyntämään oman opiskelun ja oppimisen tukena, sekä syvennytään tekoälyn käyttöön ja kehittämiseen liittyviin eettisiin kysymyksiin. Tavoitteena on, että perusopetuksen aikana oppijalle muodostuu kattava tekoälylukutaito, jolloin hän pystyy kriittisesti ymmärtämään tekoälyn mahdollisuuksia ja haasteita sekä laajasti ymmärtämään tekoälyn merkityksen ja läsnäolon elinympäristössämme.
Kuviossa 2 esitellään pääpiirteittäin ne tekoälyn osa-alueet, joiden oppimiseen kullakin luokka-asteella pyritään (= tekoälyn oppimispolku).
Kuvio 2. Tekoälyn oppimispolku
Toivomme oppaastamme olevan paljon hyötyä ja iloa niin opettajille kuin oppilaillekin. Kannustamme kaikkia rohkeasti kokeilemaan ja ihmettelemään tekoälyn maailmaa yhdessä oppilaiden kanssa!
Än, yy, tee nyt! Tekoälyä varhaiskasvatukseen hankkeen myötä avautui varhaiskasvatuksen lapsille mahdollisuus osallistua Innokas robotiikka- ja ohjelmointiturnaukseen. Uutena lajina keväällä 2024 esiteltiin Apuäly Freestyle. Erityisesti TEOS sarja on kohdennettu nuoremmille tutkijoille. Joukkueiden tehtävä on tunnistaa arkinen tarve, johon lähdetään etsimään teknologian avulla ratkaisua. Yhdessä leikkien kehitetään idea, jonka avulla arjesta tehdään sujuvampaa. Lajissa toimitaan juuri niillä tärkeillä alueilla, joita nuorten lasten kanssa tuleekin tarkastella tekoälyn ja teknologian näkökulmasta: tutkitaan oman elämän alueita, kokeillaan ja testaillaan, visioidaan ja luodaan yhdessä uusia innovaatiota.
Aikuisen tehtävä on lähteä tälle seikkailulle mukaan. Tämä voi tuntua aluksi pelottavalta. Varhaiskasvatuksen opettajan ymmärrys tekoälystä (apuälystä) ei välttämättä ole kovinkaan kattava. Hankkeen yksi tärkeä tavoite on ollut luoda tähän opettajille helposti käyttöön otettavia oppaita ja vinkkejä. Lohjalla tälle matkalle lähti kaksi erittäin rohkeaa ja ennakkoluulotonta varhaiskasvatuksen opettajaa. Heillä ei ollut aikaisempaa kokemusta turnaukseen osallistumisesta eikä kumpikaan heistä ollut Tekoälyä varhaiskasvatukseen hankkeessa mukana aikaisemmin.
Ryhmä aloitti aiheen tutkimisen Opettajan oppaasta löytyvällä tehtävällä. Ryhmä tutki tekoälyä luomalla kuvia Crayon sovelluksella ja näitä vertailtiin lasten piirtämiin kuviin samasta aiheesta. Aluksi sovellusta testattiin piirtämällä tikkareita. Omia kuvia vertailtiin sovelluksen tekemien tikkarien kanssa. Piirtäessään kuvia, lapset keskustelivat vilkkaasti mitkä maut ovat heidän mielestään parhaita. Työskentelyn edetessä osa innovoi mm. parsakaali-, hyytelö- ja suojatun tikkarin. Työskentelyä siivitti iloinen keskustelu. Kun tekoälyn avulla luotuja piirroksia tutkittiin ja vertailtiin omiin piirroksiin huomattiin, että lapset olivat tuottaneet mielikuvituksekkaita tuotoksia. Ryhmä huomasi, että tekoälyllä tuotetut kuvat muistuttivat toisiaan eikä sovelluksen avulla luotu erityisen yllätyksellisiä tuotoksia.
“Mulla on paljon eroa!”
“Tää oli aluksi vähän samanlainen!”
Tehtävä jatkui niin, että lapset ideoivat yhdessä tarinan. Tämän jälkeen piirrettiin itse ja luotiin tarinaan kuvia sovelluksen avulla. Tässä kohtaa mietittiin, millaisia ohjeita sovellukselle tulee antaa, jotta saadaan tarinaan liittyviä kuvia. Lopputulos oli yhteinen tarina, joka oli kuvitettu sekä itsetehdyillä että tekoälyn luomilla kuvilla.
Oma varhaiskasvatusyksikkö oli myös tutkimisen kohde. Lasten kanssa etsittiin tutusta ympäristöstä teknologisia ratkaisuja, keskusteltiin siitä miten ne toimivat ja mitä hyötyä niistä on. Lapset tutkivat sensorien avulla toimivia valokatkaisijoita ja vesihanoja. Keskusteltiin miksi heille suunnatut suoratoistopalvelut ehdottavat tiettyjä ohjelmia. Lapset saivat kuvata kaikkea teknologiaa ympärillään. Kuvissa oli kahvinkeittimiä, pattereita, palohälyttimiä, tietokoneita, hissi, uuni ja vaikka mitä muuta. Lapsilla oli paljon kerrottavaa kuvatuista kohteista ja heille tutuista sekä tärkeistä asioista. Tällä tavalla työskennellen opettajat saivat selkeän kuvan siitä, kuinka lapset käsittävät teknologisten laitteiden ja sovellusten käyttötarkoituksia ja toimintaperiaatteita.
Turnausta varten tuli ensimmäiseksi tunnistaa arkinen tilanne, johon tarvitaan apuvälineitä. Lapset ideoivat kaksi kohdetta: kuinka ilmaista, ettei tykkää ruoasta ja kuinka löydän kirjastosta haluamani kirjan.
Ruokailuun liittyvä haaste oli kuinka ilmaista oma mielipide asiallisesti. Ruokala käytänteiden suhteen isoissa yksiköissä kamppaillaan aikataulujen, viihtyvyyden ja toimivuuden ristiaallokossa. Lapsilla on paljon mielipiteitä ja toiveita ruokailujen suhteen. Heidän ajatuksilleen ja ideoilla ei aina ole tilaa. Tämän projektin myötä lasten ajatukset tulivat hyvin esille. Ruokailua sujuvoittamaan suunniteltu robotti auttaa lapsia tunnistamaan mitä aineksia ruoka sisältää ja suosittelee mm. annoskokoa tämän perusteella. Robotti tunnistaa ruokailijat ja heidän mieltymykset. Mikäli joudutaan tilanteeseen, että maistamiseen tarvitaan erityistä kannustinta, voi lapsi valita mieleisen palkinnon valikosta. Tämän ryhmän työssä yksittäisten lasten suunnitelmat sulautuvat, ja jokaisen ideat huomioidaan yhteisessä tuotoksessa. Suunnittelun aikana opettajalle tuli selkeästi esiin lasten ruokailussa kohtaavat haasteet.
Kirjastoon liittyvä suunnittelutyö lähti liikkeelle siitä, että tutustuttiin kirjastossa jo olemassa olevaan lainausjärjestelmään. Suunnittelu keskittyi siihen millä tavalla järjestelmää voisi kehittää eteenpäin. Suunnittelutyön lopputuloksena esiteltiin kirjasto robotti, joka tunnistaa jokaisen kirjastossa kävijän mieltymykset ja osaa ehdottaa heitä kiinnostavaa kirjaa. Lisäksi robotti hakee kirjan asiakkaalle hyllystä. Jotta odottaminen ei kävisi liian pitkäveteiseksi, saa asiakas odotellessaan herkutella esimerkiksi jäätelöllä.
Alueellisen turnauksen aikana lapset saivat esitellä teoksiaan tuomarien lisäksi muille vieraille. Tämän lisäksi projektit esitellään sekä Lohjan kirjaston edustajalle että varhaiskasvatuksen ruokahuollon työntekijöille. Haluamme antaa lapsille mahdollisuuden vaikuttaa heille tärkeiden ympäristöjen kehittämiseen ja vahvistaa heidän äänensä kuuluvuutta. Nuorten lasten ajatukset, toiveet ja ideat saadaan tällaisten projektien avulla esille. Heille tulee vahva kokemus yhteisöllisestä toiminnasta ja kehittämisestä.
Teknologian kehittymisen myötä ympäristö, jossa lapset kasvavat muuttuu. Leikin ja tutkimisen kautta lapset tuovat esille omia tulkintojaan maailmasta. Tämä tieto on aikuisille keskeistä. Innovaatioprojektissa toimintaa suunnitellaan yhdessä. Aikuisen vastuu on luoda jokaiselle tiimiläiselle mahdollisuus tuoda omia ajatuksia esille. Valmiissa keksinnössä kaikkien ideat on huomioitu. Lasten tulee aikuisen avulla löytää projektin aikana heille sopiva rooli tiimissä. Osallisuutta ei voi antaa valmiiksi suunniteltuna, vaan se on jokaiselle osallistujalle oman näköinen.
Tietotekniikka, pelillisyys ja sitä kautta kärryillä pysyminen nykyajan maailmassa ja oppilaiden todellisuudessa kiinnostaa ja innostaa minua. Haluan kokeilla uusia sovelluksia ja välillä upota VR-lasien maailmaan. Rakastan myös perinteistä lukemista ja kirjoihin uppoutumista. Haluaisin levittää tietotekniikan innostusta työkavereille ja toisaalta lukemisen ilosanomaa oppilaille koko ajan. Opettajat eivät välttämättä innostu kiireen keskellä minun tietokonejutuistani ja oppilaita ei paljoa kiinnosta se, kun yritän sanoa, miten kivaa ja tärkeää lukeminen on.
Onneksi tuli Game it Now 2.0 ja Alavan koulu pääsi siihen mukaan. Saimme kasaan mahtavan porukan ja yhteistä innostusta! Hankkeen ensimmäisellä tapaamisella mietimme, että meitä kaikkia kiinnostaa sekä tietotekniikka että lukeminen. Hahmottelimme tavan, jolla voisimme löytää jonkun kiinnostavamman kulman lähestyä tuota lukemista pelillisyyden keinoin.
Meidän koulumme on sairaalakoulu ja koostumme monista yksiköistä. Tässä hankkeessa ovat mukana Alavan yksikkö, Julkulan yksikkö ja Paloahon yksikkö. Alavassa on lähinnä alakoulun oppilaita eskareista seiskaluokkalaisiin, Julkulassa opiskelee yläkoululaisia ja Paloahossa järjestetään opetusta vaikeasti kehitysvammaisille oppilaille alakoulusta yläkouluun. Oppilasaineksen heterogeenisyydestä johtuen meillä oli jonkin verran haasteita yhdistää tavoitteet ja toiminta kaikille sopivaksi. Päädyimme sitten siihen, että jokainen saa ottaa oman tulokulman tuohon asiaan ja jokainen tekee sen, minkä katsoo omaa yksikköään hyödyntävän.
Laadimme projektille seuraavat tavoitteet: Lukemiseen innostaminen pelillisyyden elementtejä käyttäen, sanavaraston kerryttäminen, kuuntelutaitojen harjoittaminen, mielikuvituksen lisääntyminen ja rauhoittuminen asian äärelle. Ajattelimme, että tämän toteutus kestää lukukauden. Siinä ajassa pääsee jo kokeilemaan vaikka mitä, mutta ei ennätä kyllästyä koko asiaan. Tämä lukukausi tarkoittaa tätä kevättä, mutta toisaalta luku- ja peliprojektin olisi tarkoitus juurtua osaksi toimintaamme ja toteutua jollakin tavalla joka lukukausi. Ensi syksynä lähdemme kuitenkin lisäämään osaamistamme uusissa sfääreissä kurkottamalla kohti immersiivisyyttä.
Alavan yksikössä aloitimme hankkeen toiminnan selvittämällä Forms-kyselyllä oppilaiden ajatuksia lukemisesta: mikä heitä kiinnostaa ja millä heidän lukemisen innon saisi viriämään. Oppilaat saivat myös miettiä palkintoja lukemiselle. Kyselyllä oli mukana pelillisyyteen painottavia kysymyksiä, jotta saimme aiheen pysymään lähellä hanketta.
Kyselyn jälkeen opettajat koulussamme toivat lukemisen luokkaan lukemalla lähes joka päivä. Luokissa pidetään myös säännöllisiä lukuvartteja, jotka toteutuvat viikoittain samaan aikaan. Oppilaita kannustetaan käymään kirjastoautossa valitsemassa mieleistä lukemista, joka voi olla kirja, lehti tai sarjakuva. Opettajat ja ohjaajat osallistuvat lukuvartteihin esimerkkinä lukien. Lukuvartit ovat onnistuneet tosi hienosti! Oppilaista suurin osa oikeasti lukee ja lopettaa vasta, kun sanomme vartin päättyneen. Joku on myös lukenut oma-aloitteisesti tunnilla, kun koulutehtävät on tehty. Perjantaina pelaamme lautapelejä ja sanoitamme tämän pelipalkinnon tulevan onnistuneista lukuvarteista.
Lukiessamme pysähdymme uusien, vanhojen ja vaikeiden sanojen äärelle. Mietimme esimerkiksi, tiedämmekö sanan, mitä se tarkoittaa, mistä sana on suomen kieleen tullut ja kuka sitä käyttää. Lisäksi pelaamme välillä Sanulia, joka on sanapeli netissä. Kun opettaja lukee oppilaille, kirjan tapahtumia piirretään usein taululle, jotta tapahtumat selkeytyvät ja kuvien avulla on helppo muistella, mitä edellisessä kappaleessa tapahtui. Lukemiseen pyrimme innostamaan myös lukuhaasteiden avulla, kuten Pienet Helmet 2024 ja Värinautit. Lukuhaasteiden suoritus mahdollistaa pelipalkinnot. Lukemisessa pyrimme hyödyntämään myös muitakin aisteja.
Lukemisprojektin pelillisyyttä lisätään sillä, että oppilas luo itselleen oman Lukija-Avattaren ja miettimälle Avattarelle supervoiman. Avatar liikkuu sitten tasoilla, kerää XP:tä eli kokemusta lukuvarteilla ja siten pääsee liikkumaan tasoilta toiselle. Tasoilta saa sitten eri palkintoja. Luokissa meillä on käytössä VR-lasit, joiden toimivuutta ja käytettävyyttä pyrimme koko ajan parantamaan. Tällä hetkellä VR-lasit toimivat lähinnä palkintona lukemisesta.
Kevään aikana teemme sitten myös kirjan hahmon askartelumassasta ja siihen liittyvän animaation. Tekoälyn avulla voimme tehdä animaation miljöötä tai tapahtumaa. Syksyllä laajennamme osaamistamme immersiivisessä tilassa. Saa nähdä, mihin se johtaa!
Viime vuoden joulukuussa loman lähestyessä toteutimme Game it now 2-hankkeen innoittamana 5. luokkalaisten kanssa englannin, käsityön, kuvataiteen ja äidinkielen yhdistävänä projektina pakohuoneen. Tavoitteena oli, että oppilaat suunnittelevat, rakentavat, mainostavat, ylläpitävät ja lopulta purkavat koululla toimivan pakohuoneen. Onneksemme meillä oli yksi luokkatila tyhjänä, joten ei muuta kuin luovuutta kehiin ja pakohuonehommiin!
Ennen projektin alkua oli tärkeää, että me opettajat pohdimme huolella, mitä haluamme oppilaiden oppivan projektin aikana. Keskeisimmiksi osaamistavoitteiksi muodostui:
Englannin kieli: oikeinkirjoitus, sanaston laajentaminen
Äidinkieli: Tarinan kirjoittaminen, mainoksen laatiminen (=tiivistäminen)
Käsityö: Tekstiili- ja teknisen työn yhdistäminen, digitaalinen valmistaminen
Työskentelytaidot: ongelmanratkaisu, yhteistyö, oppimisen säätely (suunnittelu, seuraaminen ja arviointi)
Osaamistavoitteiden muodostamisen jälkeen oli aika laatia skripti eli pedagoginen käsikirjoitus kokonaisuudelle. Skripti sisälsi perusperiaatteen ryhmien muodostukselle (’intressiryhmät’), aikataulutuksen, tarvittavien resurssien listaamisen, oppilaiden työskentelyn tuen (ryhmäpäiväkirjan tehtävänannot), opettajien välisen työnjaon kuvauksen sekä arviointiperusteet. Koska pakohuonetyöskentely on pitkälti oppilaslähtöistä, on opettajan huolehdittava, että työskentelyssä säilyy fokus. Niinpä oppilaat kirjoittivat koko projektin ajan ryhmäpäiväkirjaa. Jokaisen projektikerran aluksi he määrittelivät ryhmänsä työskentelytavoitteen ja työnjaon, ja jokaisen projektikerran päätteeksi he reflektoivat, saavuttivatko tavoitteen, mitä haasteita kohtasivat ja miten ratkaisivat ne sekä mitä aikovat tehdä seuraavalla kerralla. Päiväkirja auttoi oppilaita pitämään työskentelyn projektissa, ja opettajille se tarjosi tietoa työskentelyn etenemisestä ja mahdollisesta tuen tarpeesta.
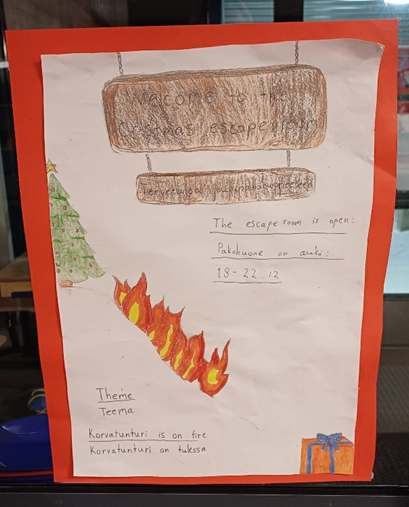
Itse työskentely aloitettiin antamalla oppilaille seuraava haaste: ’Koulussamme on tyhjä tila, johon haluamme toteuttaa joulu-teemaisen pakohuoneen. Pakohuoneen tulee tarjota mahdollisuus englannin kielen oppimiseen, ja sen tulee soveltua koko alakoulun väelle aina esikoululaisista 6. luokkalaisiin. Teillä on neljä viikkoa aikaa suunnitella ja toteuttaa pakohuone.’ Tämän jälkeen oppilaat lähtivät miettimään jouluisia teemoja pakohuoneelle. Ehdotukset olivat mitä moninaisimpia, kuten ’Lahjapaketit hukassa’, ’Petteri eksyy’ ja ’Joulupukki menettää muistinsa’, mutta lopuksi luokan yhteisellä päätöksellä pakohuoneen teemaksi valikoitui ’Korvatunturi tulessa!’.
Kun teema oli selvillä, oli aika muodostaa pienryhmät. Ryhmät olivat seuraavat: 1) mainos- ja markkinointiryhmä, 2) lavastajat, 3) pulman keksijät sekä 4) tarinan ja vihjeiden kirjoittajat. Oppilaat saivat ilmoittautua siihen ryhmään, jonka tehtävät kiinnostivat itseä eniten. Pulmaryhmiä muodostettiin yhteensä neljä, ja kukin ryhmä sai tehtäväkseen laatia yhden pulman.
Sitten käärittiin hihat ja alettiin hommiin! Tarinaryhmä ahkeroi juonen kanssa, se kirjoitettiin sekä suomeksi että englanniksi. Muut ryhmät kommentoivat tarinaa pitkin matkaa samalla kun työstivät juonta tukevia pulmia ja lavasteita. Yhteistyötä tehtiin koko projektin ajan niin oman ryhmän jäsenten kuin muiden ryhmienkin kanssa. Välillä kohdattiin myös näkemyseroja – nehän ovat osa luovaa prosessia – mutta ne saatiin aina selvitettyä.
Pakohuoneen punainen lanka oli joulukuusen valoista alkunsa saanut tulipalo, joka sytytti Korvatunturin tuleen. Pakohuoneeseen astuvan vierailijan tehtävänä oli päästä pakenemaan liekeistä, jotta hän pystyy hälyttämään palon sammuttajat paikalle. Lavastajat tekivät hienoa työtä askarrellessaan pahvista liekkimeren, maalaamalla tauluja seinille, paketoimalla tyhjiä laatikoita kuusen alle lahjoiksi ja hyödyntäessään koulun kellarin aarteita pakohuoneen rekvisiittana (kuvat 1).
Kuva 1: Lavasteryhmä teki hyvää työtä tyhjän luokkahuoneen muuttamiseksi palavaksi Korvatunturiksi
Pulmaryhmän ahkeroivat pulmatehtävien kanssa. Pulmat vaativat ratketakseen loogista päättelyä, ympäristön tarkkaa havainnointia ja kykyä nähdä asioita toisin. Laserleikkuri sauhusi ja kuumaliima höyrysi, kun pulmat alkoivat saada konkreettisen muodon. Vihjekortit kirjoitettiin kahdella kielellä. Kun yksittäiset pulmat olivat valmiita, oli aika saattaa pulmat yhteen ’pulmaketjuiksi’ eli pohtia, miten yksi pulma johtaa toiseen, ja lopulta ulospääsyyn ja pakoon.
Kuva 2. Pulmien ratkaiseminen vaati mm. loogista päättelyä
Kun lavasteet oli paikoillaan, ja pulmat sijoitettu paikoilleen, oli aika testata huone. Tarina- ja mainosryhmä kävivät testikierroksen, ja esittivät vielä ehdotukset huoneen viimeistelyyn. Viimeistelyhommat tehtiin rivakasti alta pois, ja oli aika ryhtyä markkinointikampanjaan. Mainosjulisteet (kuva 3) kiinnitettiin paikoilleen, tietoisku laitettiin koulun info-ruutuihin ja kaksikielinen mainos kajahti koulun keskusradiosta. Opettajanhuoneen pöydälle tuotiin varauskalenteri, josta opettajat saivat varailla oppilailleen vierailuaikoja. Oppilaat olivat etukäteen testanneet, että huoneen läpäisy vie keskimäärin 10 min, ja he olivat määritelleet, että pienet oppilaat kiertävät huoneen kolmen oppilaan ryhmissä opettajan kanssa, ja vanhemmat oppilaat pareittain ilman opettajaa. Pienille oppilaille vihjeet annettiin suomeksi, ja vanhemmille englanniksi.
Kuva 3. Pakohuoneen mainosjuliste
Pakohuoneen rakentajat laativat vuorolistan; aina yksi oppilaspari kerrallaan huolehti pakohuoneen pyörittämisestä. Yksi oppilas ohjeisti ryhmän ja päästi heidät sisään ja toinen oppilas avasi oven, kun kaikki pulmat oli onnistuneesti ratkaistu sekä antoi huoneen läpäisseille oppilaille tikkarit palkinnoksi. Ennen seuraavia vierailijoita pulmat palautettiin alkuperäiseen muotoonsa seuraavaa ryhmää varten.
Pakohuone pyöri koululla yhden viikon, ja oli ahkerassa käytössä joka arkipäivä klo 8-14. Se sai todella hyvää palautetta vierailijoilta, ja kiitosten myötä tekijöille jäi hyvä mieli. Vaikka pakohuoneen teko oli kova rutistus oppilailta, jäi heillä päällimmäiseksi mieleen iloinen yhdessä tekeminen ja luova puuhastelu. Ja paljon tästä opittiinkin: paitsi yhteistyöstä, myös tarinan kirjoittamisesta, englannin kielen käytöstä, kädentaidoista ja ongelmanratkaisusta. Pakohuoneidea menee jatkoon niin oppilaiden kuin opettajienkin mielestä. Eli ei kun uutta huonetta suunnittelemaan!
Rajakylän koulun Innokkaat-opet Essi Vuopala ja Lauri Nurmivuori
Pelillisyyttä lukioon -hankkeen osana Helsingin normaalilyseossa toteutettiin useita pieniä opetuksen pelillistämisen kokeiluja, kuten digitaalinen maantieteen pakopeli Syöksytulva uhkaa, ruokaohjelman ja lautapelin yhdistävä Prat om mat -peli ruotsin opetukseen sekä ympäristömyrkkyjä käsitellyt biologian moduulin Käärmeet ja tikapuut -lautapeli.
Maantieteen pakopeli
Pakopeli ”Syöksytulva uhkaa” laadittiin maantieteen ensimmäisen moduulin koekertausta varten. Pakopelin toteutettiin teknisesti niin, että pakopelin tarina (syöksytulvan uhka, aikaa pelastautua 60 min ratkomalla tehtävät) sekä tehtävät tehtiin Adobe Express -ympäristöön, jonne liitettiin digitaalisen Google Forms -vastauslomakkeen linkki. Lomakkeessa pääsi etenemään seuraavaan tehtävään vasta, kun aiemman tehtävän vastauskoodi oli oikein.
Pakopelin tehtävät liittyivät maantieteen moduulilla käytyihin asiasisältöihin, ja tehtävät sisälsivät mm. karttamerkkien tunnistamista, kartan lukemista, mittakaavan käyttöä, valtioiden tunnistamista kartalta, koordinaattien harjoittelua, maantieteellisten käsitteiden tunnistamista määritelmistä, monivalintakysymyksiä, maantieteellisten ilmiöiden tunnistamista kuvista sekä QR-koodien takaa aukeavia kysymyksiä. Osa tehtävistä oli Adobe Express -alustalla, osa oli Google Formsissa ja niihin pääsi suoraan Adobe Expressissa olleista linkeistä. Vastausten koodit ilmoitettiin vastauslomakkeelle eri tavoin: välillä koodi saatiin käsitteiden ensimmäisistä kirjaimista, välillä eri monivalintavastausten lukumääristä jne.
Opiskelijat pelasivat pakopeliä yksin tai pareittain. Pakopelin aluksi valkokankaalle laitettiin tikittävä, digitaalinen kello, jossa oli aikaa 60 minuuttia ja opiskelijat näkivät reaaliajassa, miten aika väheni kellosta. Aina, kun opiskelijat saivat tehtävän koodin ratkaistua, he pääsivät seuraavan tehtävän pariin. Mikäli opiskelija tai opiskelijapari jumittui johonkin tehtävään, heillä oli mahdollisuus pyytää opettajalta vinkkiä. Yleisimmin vinkkiä pyydettiin siihen, mikä tai mitkä kohdat koodissa ovat väärin. Seitsemän ensimmäistä tehtävää ratkaistuaan opiskelijat saivat digitaalisesta vastauslomakkeesta koodin, joka heidän piti syöttää opettajalta saatavassa pullossa olevaan lukkoon. Viimeisen haasteen kysymyksiin oli Adobe Expressissa oma linkki, ja pullossa olevaa materiaalia (eri kaupunkien ilmastodiagrammit) tarvittiin viimeisen haasteen ratkaisemiseksi. Viimeisen haasteen (syöksy)tulvia käsitteleviin kysymyksiin vastattiin Google Formsissa ja kun opiskelijat olivat valmiita vastaustensa kanssa, he lähettivät ne opettajalle hyväksyttäviksi. Opettaja katsoi vastaukset läpi ja onnitteli pakopelin läpäisseitä opiskelijoita tai pyysi tarkennuksia vastauksiin. Suurin osa opiskelijoista läpäisi pakopelin annetussa 60 minuutissa, joskin yksin pelattuna peli eteni hitaammin.
Palautteessa opiskelijat antoivat pakopelille yleisarvosanan 4,4 asteikolla 1-5, ja kysymykseen ”Miten hyvin pakopeli auttoi kertaamaan koealueen asioita?” keskiarvo oli 4,1. Pakopelistä opittiin palautteiden mukaan parhaiten maantieteellisiä käsitteitä, jotka mainittiin avopalautteissa 11 kertaa. Karttamerkit ja kartan lukeminen saivat 8 mainintaa, koordinaattien kertaaminen 5 mainintaa. Ilmastonmuutokseen liittyvät asiat mainittiin 3 kertaa ja muutamat muut asiat saivat yksittäisiä mainintoja. Muutamassa vastauksessa ei eritelty aihealueita tarkemmin, mutta todettiin, että pelistä oppi parhaiten sen, mitkä asiat vaativat vielä kertaamista.
Palautteiden mukaan pelissä oli vaikeinta yksittäisistä tehtävistä QR-koodit sekä koordinaattien mukaisten kaupunkien nimeäminen. Pakopelissä parasta oli opiskelijoiden mukaan se, että se oli hauska ja erilainen tapa kerrata kokeeseen. Myös mahdollisuutta tehdä kaverin kanssa yhteistyötä ja kerrata yhdessä asioita, arvostettiin. Pelinomaisuus sekä aikarajoite saivat myös muutamilta opiskelijoilta kehuja: ne koettiin motivaatiota lisäävänä tekijänä. Osa opiskelijoista kaipasi pakopeliin lisää aikaa, osa haastavampia ja monipuolisempia tehtäviä. Allekirjoitan itse myös tämän tehtävien monipuolistamisen: avoimia tehtäviä on todella vähän, koska peliä ei oikein saa etenemään niiden avulla nykymuodossaan digitaalisten lukkojen takia. Pakopelin malli ei myöskään toimi parhaana mahdollisena kertauksena kaikille koealueen asioille.
Ympäristöekologian lautapeli (BI3)
Ympäristöekologian Käärmeet ja tikapuut -lautapelissä eteneminen oli suunniteltu siten, että käärmeen häntään koskevassa ruudussa tietyn ympäristömyrkyn vaikutus alkaa ekosysteemissä. Jos pelaaja joutuu saman käärmeen päätä koskevaan ruutuun, joutuu pelaaja kokemaan kyseisen myrkyn vakavat vaikutukset ekosysteemitasolla. Ruuduissa, joissa tikapuut alkavat on pelaajan mahdollisuus edistyä pelissä nopeammin. Tällöin esimerkiksi lisääntyminen onnistuu joko yhden tai useamman trofiatason edustajalla. Koska tuottajat muodostavat ravintoketjun alun, pääsevät ne muita useammin siirtymään tikapuita ylöspäin. Pelin avulla usein puuduttavaksi koetusta aiheesta saatiin mielenkiintoisempi ja ympäristömyrkkyjen vaikutusten merkitys ekosysteemitasolla tuli käytyä kunnolla läpi. Pelin pelaamiseen ja sen läpikäymiseen kuluu yksi oppitunti (75 min).
Pelin alussa kullekin pelaajalle valitaan rooli pelin ekosysteemissä. Mahdollisia rooleja pelissä ovat tuottaja, 1. asteen kuluttaja, 2. asteen kuluttaja ja 3. asteen kuluttaja, joka on ravintoketjun huipulla. Roolit valitaan nopanheitoilla ja pelissä on oltava vähintään yksi tuottaja ja yksi kuluttaja. Pelin edetessä tuottajille ja eri trofiatasoille sijoittuville kuluttajille ympäristömyrkkyjen vaikutukset ovat erilaiset. Ajatuksena on, että ravintoketjun huipulla oleva kuluttaja kokee kaikkein vakavimmat vaikutukset. Tämän on tarkoitus havainnollistaa myrkkyjen rikastumista ravintoketjussa. Toisaalta tuottajien pitäisi päästä pelissä helpoimmalla, koska ne ovat ravintoketjun ensimmäisellä trofiatasolla.
Pelin aikana pelaajat lukevat kaikki pelin tapahtumat ääneen, jotta kaikki pelaajat pääsevät tutustumaan kaikkiin kohdattuihin ympäristömyrkkyihin ja niiden vaikutuksiin. Pelin aikana pelaajat myös täyttävät ympäristömyrkkytaulukkoa, johon kerätään myrkkyjen lähteet ja vaikutukset (Taulukko 1.). Pelin jälkeen opiskelijat täydentävät taulukon puuttuvat osat.
Opiskelijoiden mukaan peli opetti hyvin ympäristömyrkkyjen lähteet ja vaikutukset sekä ympäristöön että ihmisille. Peliin toivottiin lisää tietoa siitä, miten ympäristömyrkkyjen haittoja voitaisiin estää. Pelejä toivottiin hyödynnettävän erityisesti lajintunnistukseen, eri biomien ominaispiirteiden opetteluun sekä aineiden kiertoihin. Viimeisen avoimen kysymyksen kohdalla moni antoi hyvää palautetta siitä, että peli oli mukavaa vaihtelua oppitunnille ja auttoi ymmärtämään monimutkaista aihetta. Toisaalta osa oli sitä mieltä, että pelitunnilla heidän oli vaikeaa keskittyä ja keskittyminen siirtyi helposti muuhun kuin opiskeluun.
Ympäristömyrkkypeli oli kaikkiaan onnistunut kokeilu. Pelin aikana tutustuttiin laajasti ympäristömyrkkyjen päästölähteisiin ja vaikutuksiin sekä havaittiin myrkkyjen vaikutukset eri trofiatasoilla. Taulukon täyttäminen pelin aikana vaati kysymysten ja vastausten läpikäynnin pelin aikana ääneen ja varmisti sen, että pelistä jäi myös jokin konkreettinen muistiinpano. Opiskelijat kokivat pelitunnin virkistävänä vaihteluna. Pelaaminen vaatii kuitenkin opiskelijalta aktiivista roolia ja keskittymistä, minkä takia osa kenties koki, että perinteinen opetustapa olisi sopinut heille paremmin. Pelejä toivottiin silti myös lisää moduulin muutamien muiden vaikeiden asiakokonaisuuksien opetteluun.
Kirjoittajat: Outi Houtsonen, Jani Kiviharju ja Annina Rostila, Helsingin normaalilyseo / HY ja eNorssi
”Yksisarviset laskevat liukumäkeä nakkivuorella. Taivaalta sataa kissoja ja karvaisia lepakoita. Vesi on mansikkahilloa ja kaikki ihmiset ovat banaaneja.”
On siinä tekoälyllä tekemistä, että pystyy toteuttamaan Rajakyläteknon kolmasluokkalaisten villejä visioita. 3A-teknoluokassa on syksyn aikana tehty hiljalleen pieniä kokeiluja generatiivisen tekoälyn kanssa, eli oikeastaan tutustuttu uuteen työkaveriin. Tekoäly nimittäin tulee olemaan näille oppilaille sekä työkalu että työkaveri, kun vuodet vierivät, algoritmit oppivat ja laskentateho kasvaa.
Jo nyt tekoäly osaa tehdä aika monia asioita niin hyvin, ettei sen tekemisiä erota ihmisen tekemisistä. Oppilaat tutkivat kolmen tuotteen sarjoja, joista jokaisessa oli yksi aito ja kaksi tekoälyllä tuotettua jäljitelmää: kolme runoa, joista vain yksi oli ihmisen kirjoittama, kolme maalausta, joista vain yksi oli ihmisen maalaama, kolmet ihmiskasvot, joista vain yhdet kuuluivat oikealle ihmiselle… Viimeistään tämän harjoituksen päätteeksi oli varmasti kaikille selvää, että generatiivinen tekoäly osaa tuottaa niin aitoja jäljitelmiä, ettei niitä erota aidoista. Tämä ei ole ihme, sikäli kun jäljitelmän tunnistamiseen on GAN-neuroverkossa sisäänrakennettu prosessi. Perehdyimme hieman, miten algoritmi toimii, ja mallinsimme sitä luokassa piirtelemällä aitoja kuvia ja niiden jäljennöksiä (Tsekkaa Rajakyläteknon tekoälymateriaali).
Tekoäly on oppiva tietokoneohjelma, ei sääntöihin ja käskyihin perustuva, kuten oppilaiden tuntemat Scratchit, Beebotit, Code.orgit ja vastaavat. Generatiivista tekoälyä siis opetetaan ja se pystyy tuottamaan tekstiä, kuvaa ja ääntä oppimansa perusteella. Kenties vaikea ymmärtää, mutta ainakaan tekoälysovelluksia ei ole vaikea käyttää.
Meille juuri sopivaan aikaan Oulun kaupungin oppilaat saivat käyttöönsä Adobe Express-kuvankäsittelyohjelmiston, josta löytyi näppäriä tekoälypohjaisia kuvageneraattoreita ja kuvanmuokkaustyökaluja. Näiden kanssa oli hauskaa. Kirjoitusharjoituksiin tuli aivan uutta virettä, kun oli tiedossa, että teksti syötetään kohta promptina kuvageneraattoriin! Paljon kissasadetta ja nakkivuoria siis, mitäpä muutakaan? Osa oppilaista innostui myös ottamaan kuvia itsestään ja lisäilemään kuviin esineitä pyytämällä lisäyksiä tekoälyltä. Kuvissa esiintyi paljon parrakkaita ja aurinkolasipäisiä kolmosluokkalaisia.
Opettaja tietää melkein kaiken, mutta onneksi tekoäly tietää senkin, mitä opettaja ei tiedä. Käytimme siis hetken kyselemällä tekoälyltä lyhyitä vastauksia pitkiin ja polveileviin kysymyksiin. Melko mukavasti uusi Bing tiesi asioita esimerkiksi aurinkokunnasta ja historiasta. Varsin harmillisesti Bingin keskusteluominaisuus oli estetty kaupungin oppilastunnuksilla. Toivottavasti tämä mainio tiedonhakuapuri saadaan pian myös oppilaiden käyttöön.
On silmiä avaavaa viettää edes hetki tekoälyllä terästettyjen kuvageneraattorien ja keskustelubottien kanssa. Toiveena on, että nämä kokeilut tukevat oppilaiden ymmärrystä teknologisesta ja erityisesti digitaalisesta maailmasta ja avaavat uusia näkökulmia, näköaloja ja visioita. Varmaa on, että ennen pitkää tekoälystä tulee meille kaikille tukiäly, työkalu ja työkaveri.
Elokuussa 2023 Innokas-verkosto yhteistyössä viiden koordinaattorikunnan kanssa käynnisti tekoäly-hankkeet varhaiskasvatuksen ja perusopetuksen. Hankkeen matka on ollut innostava ja hankeopettajien yhteisesti luoma ymmärrys on vienyt hanketta mallikkaasti eteenpäin. Hankkeen menneet ja tulevat askelmerkit on kuvattuna alla olevalla aikajanalla.
Reilu vuosi sitten, uutisoinnissa ajankohtaisen tekoälyn ilmiön äärellä, aloitti joukko ilmiölle täysin uusia opettajia sekä hieman aiheeseen tutustuneita opettajia, joita yhdisti uteliaisuus aiheen piiriin. Alkuun tekoäly ilmiön uutuusarvo näkyi etenkin opettajien kriittisyytenä ja epätietoisuudessa aiheesta. Yhteisten keskusteluiden, opetuskokeiluiden, tiedonetsinnän ja oppilaiden kanssa yhteisesti aiheeseen tutustuen, tämäkin ilmiö alkoi avautua. Eteneminen ei suinkaan ollut lineaarista, vaan mutkittelevaa ja tutkivaa, palatiiin aiheisiin uudestaan ja päivitettiin aiempaa ymmärrystä. Uuden luominen vaatii tälläistä epälineaarista kulkemista. Keskustelun ja hankeopettajien tekemien kokeilujen kautta laajennettiin ymmärrystä ja ajattelua, mikä poiki yhä uusia luovia ideoita ja kokeiluja.
Hankkeen edetessä puhe tekoälystä ilmiönä on ratkaisukeskeistä ja keskustelevaa. Vuosi aloittamisen jälkeen kuuluu jo vahvasti hankeopettajien eri näkökulmat ja aktiivinen kehittävä ote tekoälyyn. On löydetty miten käyttää tekoälyä oppimisen välineenä, oppimisen apuna sekä uutta luovan toiminnan mahdollistajana. Konkreettisesti tämä näkyy hankeopettajien luokissaan aloittamissaan luovina projekteina ja tekoälyaiheisen MOK-kokonaisuuden suunnitelmassa.
Hankkeessa kehitetään menetelmiä ja välineitä tekoälyilmiön ymmärtämiseen varhaiskasvatuksesta yläkouluun. Konkreettisina välineinä on tulossa tekoälykartta ja lukuisat oppimateriaalit. Kartan avulla opettaja ryhmineen pääsee kysymysten äärelle tekoälystä. Matkan varrella on rasteja, joissa esitetään alustavia vastauksia kysymyksiin, rohkaistaan etsimään lisätietoa ja annetaan innostavia opetusvinkkejä eri tasoisesti miten oppia aiheesta lisää. Tämä tekoälykartta oppijalle sekä lukuisat oppimateriaalit julkaistaan hankkeen loppupuolella, suunnitelmissa ITK-messuilla 2024.
Hankkeessa tehtiin tärkeä periaatepäätös julkaista oppimateriaaleja sitä mukaan, kun hankeopettajat saavat työstettyä niitä valmiiksi. Nämä löydät varhaiskasvatuksen ja esiopetuksen materiaalit täältä sekä perusopetuksen opetusmateriaalit täältä. Hanketiimin tuottamia oppimateriaaleja on hankeopettajat jakanut alueillaan sekä laajemmalle kuulijakunnalle mm. kevään 2023 ITK-messun Areena esityksessä sekä Innokas-verkoston sosiaalisen median kanavissa syksyn mittaan. Jää seuraamaan Innokas-verkoston Facebook tai Instagramia sillä alkuvuoden 2024 aikana on päivitämme näihin uusia sisältöjä. Tulossa mm. alakoulusta yläkouluun järjestettävälle tekoäly aiheiselle MOK-kokonaisuudelle sekä miten hyödyntää micro:bit ja Lego Spikeja koneoppimista hyödyntävien kasvontunnistuksen tai äänentunnistuksen opettamiseksi.
Lahnuksen koulun lähtiessä mukaan Innovatiivinen koulu toimii -hankkeeseen olin siinä uskossa, että tehdään vähän ja saadaan jonkin verran uutta aikaiseksi. Alkuperäinen ajatus oli myös, että hankkeessa olisi useampi opettaja mukana alusta loppuun. Kaikki ei aina mene ihan suunnitelmien mukaan – loppujen lopuksi hanketiimiksemme marionoitui minun ja neljän 6.luokkalaisen oppilaan tehokas tekniikkaryhmä. Ja saimme todella paljon aikaiseksi!
Meidän koulumme osahankkeena olivat digiportaiden päivittäminen sekä tekniikkaryhmän toiminnan aloittaminen ja kehittäminen. Digiportaita oli syytä päivittää niin, että jokainen opettaja tietäisi, minkälaisia digitaitoja ja -laitteita hän voi tai hänen tulee opetuksessaan opettaa ja käyttää. Portaiden tuli olla niin matalat, että jokainen opettaja pystyi taidoistaan ja motivaatiostaan riippumatta siirtymään vaivatta aina seuraavalle portaalle.
Digiportaita uudistettiin, muokattiin ja päivitettiin monta kertaa yhteisissä opettajien tapaamisissa keväällä 2022. Käyttöön uusi strategiamme otettiin virallisesti syksyllä 2023. Portaista tuli selkeät ja johdonmukaiset, vaikka vielä niihin jäi kehittämistäkin. Monet opettajat eivät päässeet joissain asioissa kokeiluvaihetta pidemmälle kun taidot tai aika loppui kesken. Pitääpä vielä ensi vuonna lisätä otsikkojen taakse linkitetyt videot ohjeineen!
Sitten päästiin varsinaisen pihvin, eli tekniikkaryhmän kehittämisen pariin. Kuudennen lluokan oppilaista pyydettiin innostuneita, osaavia ja kiinnostuneita oppilaita mukaan toimimaan koulun tekniikkaryhmänä. Neljän sopivan oppilaan löydyttyä alkoi heidän kouluttamisensa. Tekniikkaryhmän päätehtäväksi muodostui opettajien ja oppilaiden avustaminen kaikissa mahdollisissa koulussa esiintyvissä teknisissä ongelmatilanteissa. Näitä olivat mm. robottien opettamisen/käyttämisen opettaminen, esitystekniikan asentaminen/korjaaminen, esityksissä ja juhlissa salin valojen/tekniikan rakentaminen, valmistaminen ja käyttäminen sekä lukuisat muut pienemmät ja isommat tekniikkaan liittyvät tehtävät.
Tekniikkaryhmän kouluttamista ja vastuuttamista jatkettiin pitkin lukuvuotta. Viimeisimpänä ryhmä koulutti seuraavia, nyt 5.luokkalaisia tekniikkaryhmäläisiä jakaen heille ainakin osan oppimastaan tiedosta tulevaa lukuvuotta varten.
Nyt kun hanke on loppumaisillaan, on todella hyvä olo kaikesta tapahtuneesta. Ainoana vastuullisena aikuisena tässä oli omat haasteensa, mutta mainion oppilasryhmän kanssa yhdessä tekeminen oli todella antoisaa. Oli ilo kirjoittaa tekniikkaryhmäläisille kehuvat työtodistukset heidän tärkeästä panoksestaan koulumme lukuvuoden onnistumisen eteen. Toivottavasti heille jäi tästä kaikesta yhtä hyvät fiilikset kuin tälle opettajalle!
Ylikylän peruskoulussa on maker-toiminta käynnistynyt hyvin kuluneen lukuvuoden aikana. Valinnaisryhmien aikaansaannokset ja positiivinen juorukehu on kiirinyt ja saanut aikaan kiinnostusta syksyllä 2023 alkavaan valinnaisaineryhmän toimintaan. Myös opettajat ovat innostuneet toteuttamaan maker-toimintaa omien oppilasryhmiensä kanssa ja valinnaisaineryhmistä on löytynyt innokkaita oppilaita ohjaamaan ja jakamaan osaamistaan.
Peliohjaimen innovointia Makey makeylla.
Onnistumisen kokemuksia on kertynyt koko hankkeen ajalta. Hankkeen alkuvaiheessa saimme paljon tukea maker-toiminnan suunnitteluun ja materiaalihankintoihin niin yhteisissä hanketapaamisissa, kuin vieraillessa toisilla kouluilla. Hankkeen toisena vuotena pääsimme aloittamaan varsinaisen maker-toiminnan valinnaisryhmien kanssa. Yläkoulun valinnaisryhmä on saanut olla vahvasti mukana koulumme maker-toiminnan suunnittelussa ja kehittämisessä tulevia lukuvuosia varten. Näin oppilaiden osallistamisessa on myös onnistuttu mielestämme hyvin.
Maker-toiminnalle ominainen tapa työskennellä ennakkoluulottomasti uusien aiheiden parissa kokeillen ja ryhmässä oppien on ollut kullanarvoista myös henkilökunnalle. Hankkeen aikana on järjestetty henkilökunnalle useita toiminnallisia mahdollisuuksia tutustua maker-toimintaan ja sen välineistöön. Tavoitteena on ollut tarjota kepeä lähestymistapa maker-toimintaan ja jokainen on saanut osallistua itselle mieleiseen tekemiseen. Loppukeväästä varmistimme jokaiselle koulun opettajalle mahdollisuuden tutustua maker-toimintaan yhteisen veson merkeissä. Vesossa luokan- ja aineenopettajat tutustuivat sekaryhmittäin koulun maker-välineistöön ja erilaisiin sovelluksiin. Niin pienemmissä ys-ajalla järjestetyissä koulutuksissa kuin koko opetushenkilöstön vesossa oli mukavaa tekemisen meininkiä ja innokasta puuhastelua.
Innokkaat opettajat robotiikaa oppimassa.
Hankkeen päätösseminaarissa saimme vielä vahvistusta toimintaamme, kun muilta hankkeessa mukana olleilta kouluilta tuli positiivista palautetta ja kiinnostuneita lisäkysymyksiä. Erityisesti kiitosta sai yläkoulun oppilaiden osallistaminen koulun maker-kulttuurin ja -toiminnan luomiseen sekä rehtorin tarjoama vahva tuki toimintaan. Näillä eväillä on hyvä jatkaa eteenpäin.
Katse tulevaan
Hankkeen päätteeksi haimme pientä nousua tulevan lukuvuoden maker-toimintaan Helsinkiin suuntautuneella opintomatkalla. Saimme tutustua Heurekan Ideaverstaaseen ja Tekoäly-näyttelyyn sekä vierailla Helsingin keskustakirjasto Oodissa. Heurekassa heräsi vahva haave Ylikylän peruskoulun omasta mäkiautohaasteesta, jossa luokkaparit pääsevät toimimaan yhdessä ongelmanratkaisutehtävien parissa. Rakennusprojekteja tutkaillessa hymyilytti, kuinka luovan ongelmanratkaisun vaiheet noudattivat pitkälti innovaatioprosessin kaavaa. Oodissa tutustuimme kirjaston kaupunkiverstaaseen ja ihmettelimme, kuinka monipuoliset ja hyvin organisoidut työtilat kirjastossa on. Samalla kokosimme hanketoiminnan pääkohdat ja suunnittelimme koulun maker-toimintaa tulevalle lukuvuodelle. Opintomatkan myötä kehittelemme ajatusta oman koulun verstastoiminnasta ja työpajoista, jotka mahdollistavat yhteisöllisen työotteen koulun alueella.
Oodin kaupunkiverstaan 3D-tulostimia työn touhussa.
Innovatiivinen koulu toimii -hanke on ollut valtavan hyödyllinen ja hauska tapa viedä eteenpäin koulumme maker-toimintaa. Aurinkoisten kesäpäivien jälkeen hanketiimimme hyppää innolla mukaan tulevan lukuvuoden suunnitteluun ja uusien koulun maker-kulttuuria kehittävien projektien pariin!
Innokkain terveisin,
Eeva-Riitta, Domna, Jenny ja Harri, Ylikylän peruskoulun IKT-tiimi






 kuvan siitä, kuinka lapset käsittävät teknologisten laitteiden ja sovellusten käyttötarkoituksia ja toimintaperiaatteita.
kuvan siitä, kuinka lapset käsittävät teknologisten laitteiden ja sovellusten käyttötarkoituksia ja toimintaperiaatteita.